Retrouve ici une correction pas à pas sur vecteurs, produit scalaire et
équations de plans, avec une mise en forme claire, pour t’entraîner efficacement.
Mots-clés : vecteurs, produit scalaire, angle, plan cartésien, vecteur normal, intersection de plans, géométrie 3D, exercices corrigés
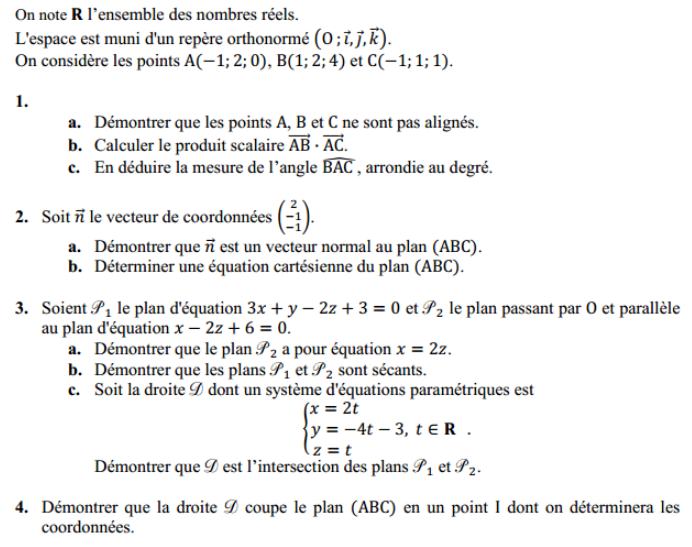
Énoncé
Révéler le corrigé
1. a. Montrons que les vecteurs AB et AC ne sont pas colinéaires.
Les vecteurs AB et AC ne sont pas colinéaires car 20=41. D'où les points A, B et C ne sont pas alignés.
b.
AB.AC=2×0+0×(−1)+4×10+0+44⟹AB.AC=4
c.
AB=(1−(−1))2+(2−2)2+(4−0)2
=22+02+42=4+16
⟹AB=20=25
AC=(−1−(−1))2+(1−2)2+(1−0)2
=02+(−1)2+12=1+1
⟹AC=2
D'où
AB.AC=AB×AC×cos(BAC)=25×2×cos(BAC)
=210cos(BAC)
⟹AB.AC=210×cos(BAC)
{AB.AC=4AB.AC210×cos(BAC)⟹210×cos(BAC)=4
⟹cos(BAC)=2104=102⟹BAC=arccos(102)
⟹BAC≈51o(arrondi au degreˊ preˋs)
2. a. Montrons que le vecteur n est orthogonal aux deux vecteurs non colinéaires AB et AC du plan
Nous savons que n2−1−1;AB204;AC0−11.
n.AB=2×2+(−1)×0+(−1)×4=0
⟹n⊥AB
n.AC=2×0+(−1)×(−1)+(−1)×1=0
⟹n⊥AC
Puisque le vecteur n est orthogonal aux deux vecteurs non colinéraires AB et AC du plan ,nous en déduisons que le vecteur n est orthogonal au plan (ABC).
b. Nous savons que tout plan de vecteur normal n de coordonnées (a ; b ;c) une équation cartésienne de la forme ax+by+cz+d=0.
Puisque le vecteur n2−1−1 est normal au plan (ABC), nous déduisons qu'une équation cartésienne du plan (ABC) est de la forme 2x−y−z+d=0
Or le point A(−1;2;0) appartient au plan (ABC).
Ses coordonnées vérifient l'équation du plan.
D'où−2−2−0+d=0, soit d=4
Par conséquent, une équation cartésienne du plan (ABC) est : 2x−y−z+4=0
3. a. Un vecteur normal au plan d'équation x−2z+6=0 est n310−2.
Puisque ce plan est parallèle au plan P2, le vecteur n3 est également normal à P2.
Nous déduisons qu'une équation cartésienne du plan P2 est de la forme x−0y−2z=0, soit x−2z+d=0
Or le point O(0;0;0) appartient au plan P2.
Ses coordonnées vérifient l'équation plan.
D'où 0−0+d=0, soit d=0
Par conséquent, une équation cartésienne du plan P2 est : x−2z=0, soit x=2z
b. Une équation cartésienne de P1 est 3x+y−2z+3=0. D'où un vecteur normal au plan P1 est n131−2.
Une équation cartésienne de P2 est x−2z=0.
D'où un vecteur normal au plan P2 est n210−2.
Ces deux vecteurs normaux ne sont pas colinéaires car 31=−2−2.
Par conséquent, les plans P1 et P2 sont sécants.
c. Un point M quelconque de la droite D admet comme coordonnées (x;y;z)=(2−3;t) avec t appartient R.
Ce point M appartient au plan P1 si ses coordonnées vérifient l'équation 3x+y−2z+3=0 du plan.
Or 3×2t+(−4t−3)−2t+3=6t−4t−3−2t+3=0
Puisque les coordonnées d'un point M quelconque de la droite D vérifient l'équation du plan P1, nous en déduisons que la droite D est incluse dans le planP1
De même, ce point M appartient au plan P2 si ses coordonnées vérifient l'équation x−2z=0 du plan.
Or 2t−2t=0
Puisque les coordonnées d'un point M quelconque de la droite D vérifient l'équation du plan P2, nous en déduisons que la droite D est incluse dans le planP2.
Par conséquent, la droite D étant incluse dans les deux plans P1 et P2, cette droite D est l'intersection des deux plans P1 et P2.
Les coordonnées du point I sont les solutions du système composé par les équations de la droite D et du plan (ABC), soit du système : ⎩⎨⎧xyz2x−y−z+4====02t−4t−3t